a14g-final-submission-t26-circuit-crusaders

a14g-final-submission
- Team Number: 26
- Team Name: Circuit Crusaders
- Team Members: Saurabh Parulekar, Binh Nguyen
- Github Repository URL: Circuit Crusaders Repository
- Github Pages URL: Helmate Public GitHub Page
- Description of test hardware:
- HP Pavilion Windows Gaming laptop, 15” 8GB i5
- Apple M2 Pro - Macbook
1. Video Presentation
2. Project Summary
-
Device Description:
-
What problem is your device solving?
The HelMate project is designed to significantly enhance safety for two-wheeler riders by encouraging consistent helmet use. The device can be attached or detached from any helmet and connects to the rider’s mobile phone via Bluetooth to deliver navigational directions through haptic feedback motors on both sides of the helmet. It also features automatic or manual turn signals visible to following vehicles, enhancing communication and safety on the road.
Additionally, the helmet is equipped with a brake light that activates when the rider stops and deactivates when in motion, thanks to an onboard accelerometer that detects changes in movement.
For security, the helmet detects unusual movements to trigger alerts for potential theft of the helmet or bike. It also includes a Blind Spot Monitoring System with IR-based sensors to detect objects outside the rider’s direct line of sight, reducing the risk of accidents with unseen vehicles or obstacles.
Riders can control and customize the helmet’s features, such as theft detection, turn signals, and brake lights, through a centralized dashboard. This dashboard also displays vital information including theft alerts, accelerometer data.
-
How do you use the Internet so augment your device functionality?
Real-Time Data Processing and Accessibility: Using Node-RED hosted on an Azure VM allows for the efficient processing and management of real-time data from the helmet. This setup ensures that data such as navigation directions, motion alerts, and crash or theft-detection data are handled promptly and reliably. This allows users to interact with their helmet or check its status from anywhere.
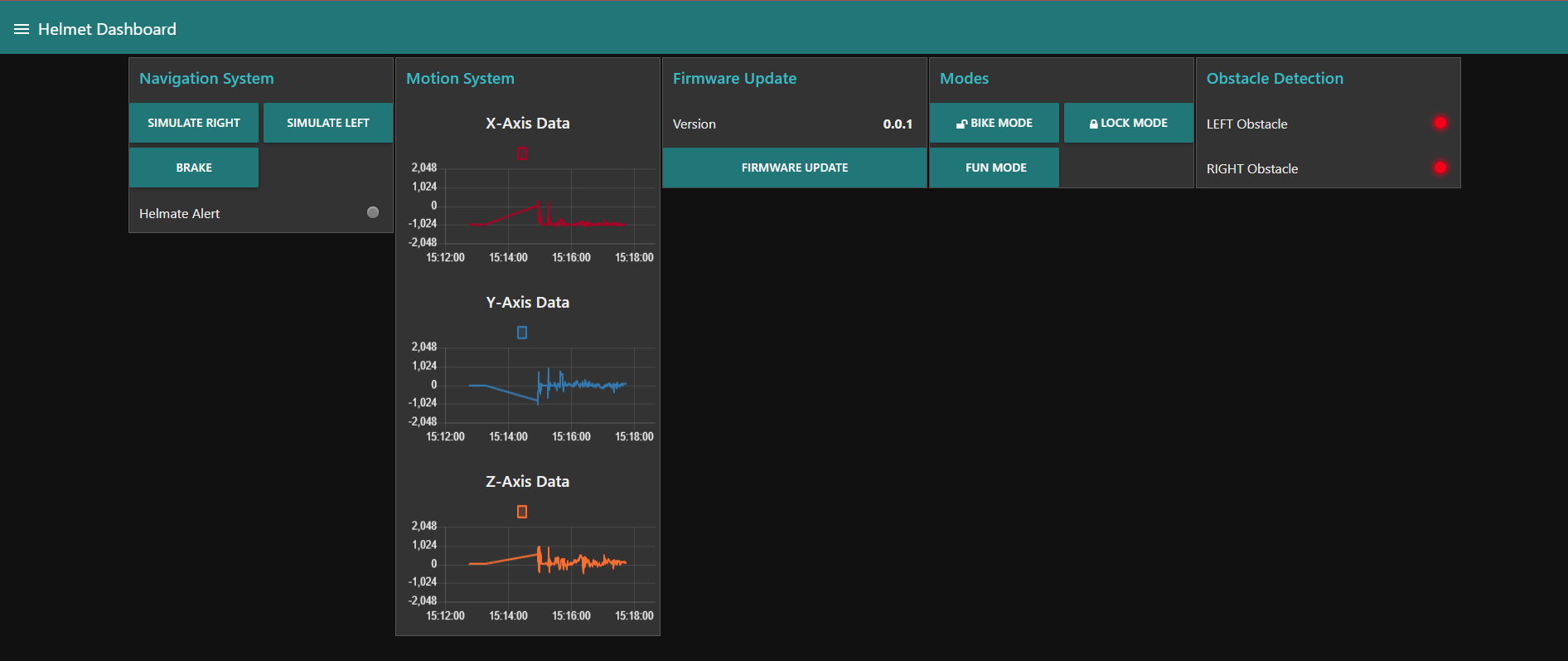
User Interface and Interaction: A Node-RED dashboard provides a user-friendly interface for riders to monitor various metrics like theft alerts, navigation signals, current mode, and obstacle sensor status. This dashboard is accessible via the Internet, which offers convenience and ease of use. The system can send alerts and notifications directly to the rider’s smartphone.
Firmware and Software Updates: Through the Internet, updates to the helmet’s software or firmware can be pushed remotely, so that all users have the latest features and security updates without needing physical access to a service center.
-
-
Inspiration:
The inspiration for “HelMate” came from Saurabh’s personal experiences while biking an impressive 900 miles during his internship in California. Saurabh encountered many challenges, such as navigating busy roads while maintaining focus, dealing with visibility issues during night rides, and the constant threat of accidents due to blind spots and sudden stops. These experiences highlighted a significant need for enhanced safety measures for bikers. Meanwhile, Binh noted that modern cars are equipped with advanced safety features like navigation assistance and blind spot detection that significantly reduce the risk of accidents but are conspicuously absent in motorcycle gear.
Realizing that such features are not applied to two-wheeler vehicles, we were motivated to bridge the gap in safety features between cars and two-wheeler vehicles. This led to the creation of “HelMate,” a device designed to bring sophisticated safety and navigation features to two-wheelers, this probably can enhance rider safety and confidence on the road.
-
Device Functionality:
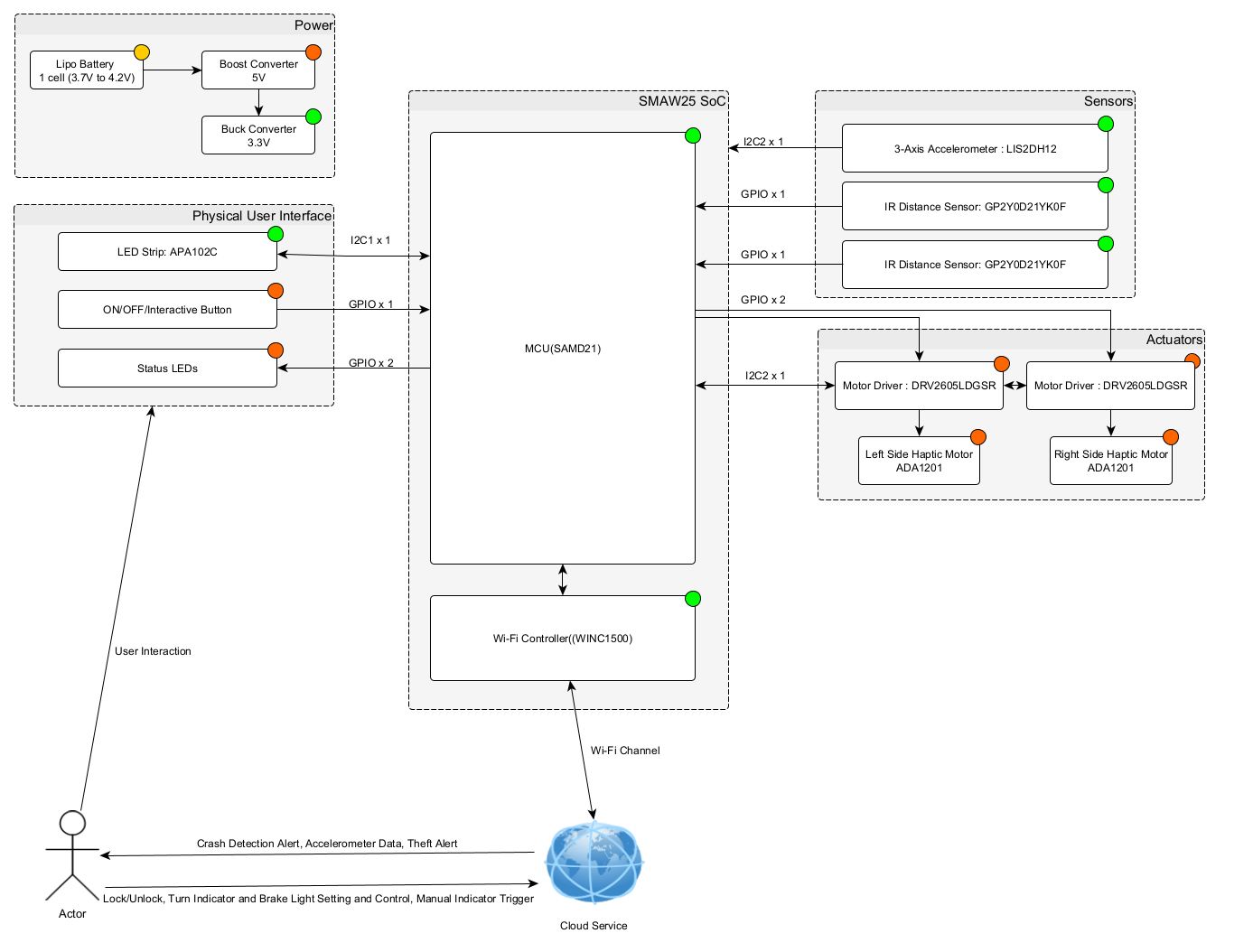
The “HelMate” smart helmet device is ingeniously designed to enhance safety for motorcyclists and bicyclists through integrated technology and Internet connectivity. Central to its operation is a microcontroller that processes inputs from various sensors and controls the helmet’s functions. It features a 3-axis accelerometer for detecting sudden stops or crashes, and IR sensors to monitor blind spots. Actuators in the helmet include haptic feedback motors that provide navigational cues through subtle vibrations, and LED lights that function as turn signals and a brake light to enhance visibility on the road. The helmet connects to the Internet via Wi-Fi, allowing it to access cloud services hosted on an Azure Virtual Machine. This connectivity supports real-time traffic updates, navigation assistance, and the ability to transmit critical data for emergency services. Node-Red serves as the user interface, this will enable riders to customize settings, receive alerts, and view helmet status. This layered design, encompassing sensory data collection, processing, and interactive connectivity, positions “HelMate” as a transformative safety device in the two-wheeler landscape.
-
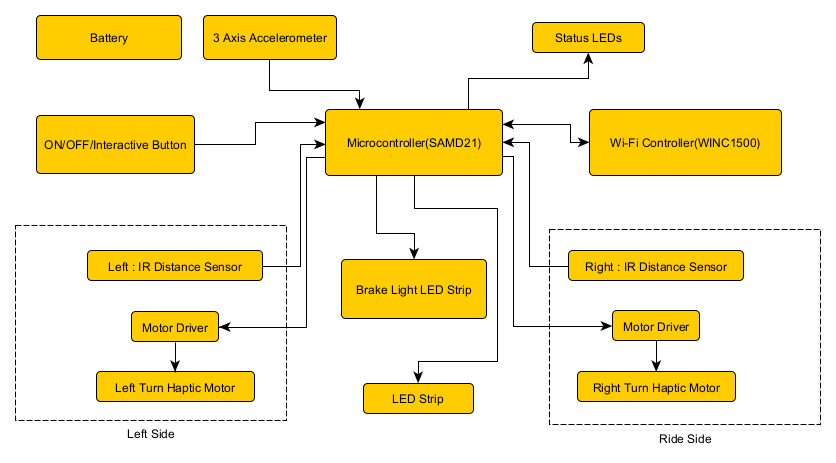
Block diagram:
-
-
Challenges:
-
I2C Bus Management and Driver Development:
- Problem was about managing two different I2C buses, I2C1 (SERCOM3) for controlling the LED strip, and I2C2 (SERCOM0) for managing the haptic feedback motors and the accelerometer. The primary issue was to prevent bus contention and ensure smooth communication.
- Solution: we made a driver such that a single mutex is used to control either of the busses, hence only one transaction happens and it does not cause contention on Mutex.
-
Faulty Accelerometer Driver:
- Problem: During the debugging phase, we discovered that the driver provided by the accelerometer manufacturer was flawed, which caused incorrect data readings
- Solution: By reviewing the accelerometer’s datasheet, we identified the discrepancies between the expected and actual driver behavior. So we then modified the driver accordingly, which resolved the data accuracy issues.
-
Memory Management for Tasks:
- Problem: There were separate tasks, which were assigned to manage different functionalities. This led to inefficient memory usage and increased system complexity. And we ran out of Memory!
- Solution: we optimized memory usage by combining multiple tasks into two main tasks, which are more efficient task structures. This not only simplified the firmware architecture but also improved the overall performance and stability of the system.
-
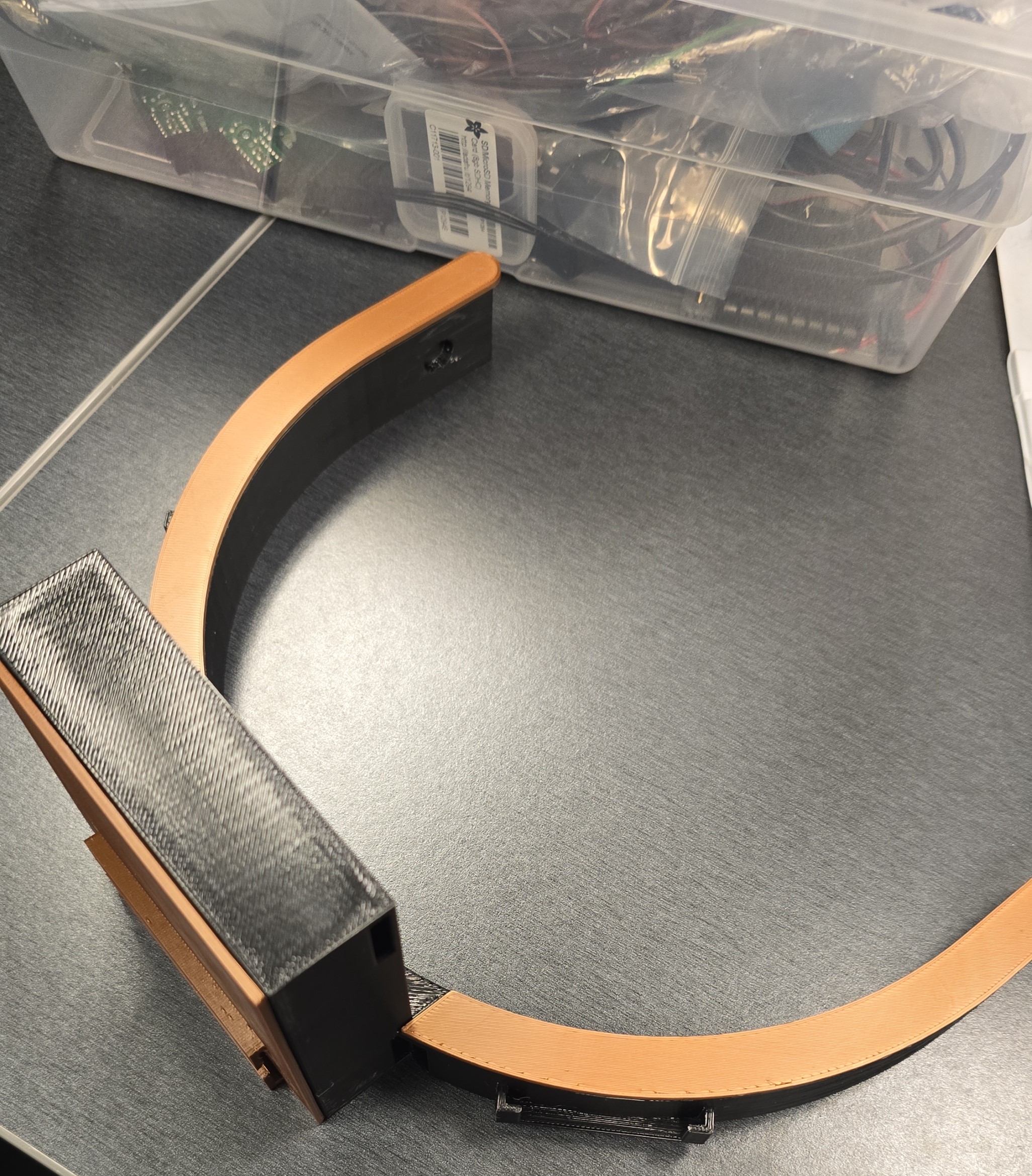
Component Fitting in 3D Helmet Model:
- Problem: Our initial 3D printed helmet model did not correctly accommodate the PCB and the sensors, and there were unexpected issues with internal wiring layouts and paths.
- Solution: we revised the internal design and printed two different 3D models to test various component arrangements and wiring configurations. This also ensured that the all parts fit perfectly and functioned as intended.
-
-
Prototype Learnings:
-
Lessons:
Building and testing the “HelMate” prototype provided several key lessons. Firstly, utilizing advanced tools like Altium for designing the PCB was invaluable, enhancing our capability to manage complex circuit designs effectively. We also deepened our understanding of real-time operating systems (RTOS), learning to integrate multitasking into our application efficiently, which significantly improved the device’s responsiveness and reliability. Another crucial lesson was the importance of extensive testing under diverse environmental conditions. This testing phase exposed certain vulnerabilities in sensor accuracy and hardware durability that were not evident during initial lab tests. Additionally, using Git for version control taught us better ways to collaborate, manage code revisions, and maintain a coherent development workflow. These lessons have fundamentally shaped our approach to hardware and software integration, which emphasizes the necessity of robust testing and efficient project management.
-
Reflections for Future Development:
- A primary update will involve integrating Bluetooth connectivity to enable seamless communication between the helmet and a smartphone. This will support a new mobile application dedicated to controlling the helmet’s features, such as customizing the LED light patterns directly from the user’s phone. This will offer riders the ability to personalize their visibility on the road.
- The design will also be refined to make the device more compact. This will involve reducing the size of the PCB, which not only makes the helmet lighter and more comfortable.
-
-
Next steps:
- We will plan to integrate a Bluetooth module and build a “HelMate” App for smartphones. This feature will allow the helmet to communicate seamlessly with smartphones. This addition will support a new mobile app developed specifically for the device
- Improving communication capabilities is a key focus. By enhancing the sensor technology within the helmet, we will be able to provide more accurate and reliable notifications to the rider, thereby reducing the risk of accidents due to miscommunication, and the risk of potential accidents can be more predictable. This will make interactions on the road safer.
- We also plan to leverage cloud technology to a greater extent by storing data related to user behavior. This data will be invaluable for ongoing analysis. This will provide insights into user behavior, and allow for continuous improvements to the device based on actual usage patterns. Therefore, “HelMate” will not only become more user-friendly and effective but also continue to set new standards in motorcycle safety technology.
-
Takeaways from ESE 5160:
The ESE5160 course provided a comprehensive journey through the product development cycle, from initial concept to finalized prototype. Lectures and assignments were instrumental in detailing each stage of the process, emphasizing practical skills in PCB design with Altium, firmware programming, hardware and software testing, debugging, driver development, and 3D modeling for case construction. This holistic approach not only demonstrated the technical intricacies involved in creating a functional electronic device, but the course also offered a broad perspective on industry standards and practices. The experience has been pivotal in understanding how theoretical knowledge applies in real-world scenarios. Ultimately, this prepares us for professional challenges in electronics systems and firmware engineering.
Project Links
Node-Red
CodeBase
Altium Files
3. Hardware & Software Requirements
Hardware Requirements
- Directional Haptic Vibration Notification System:
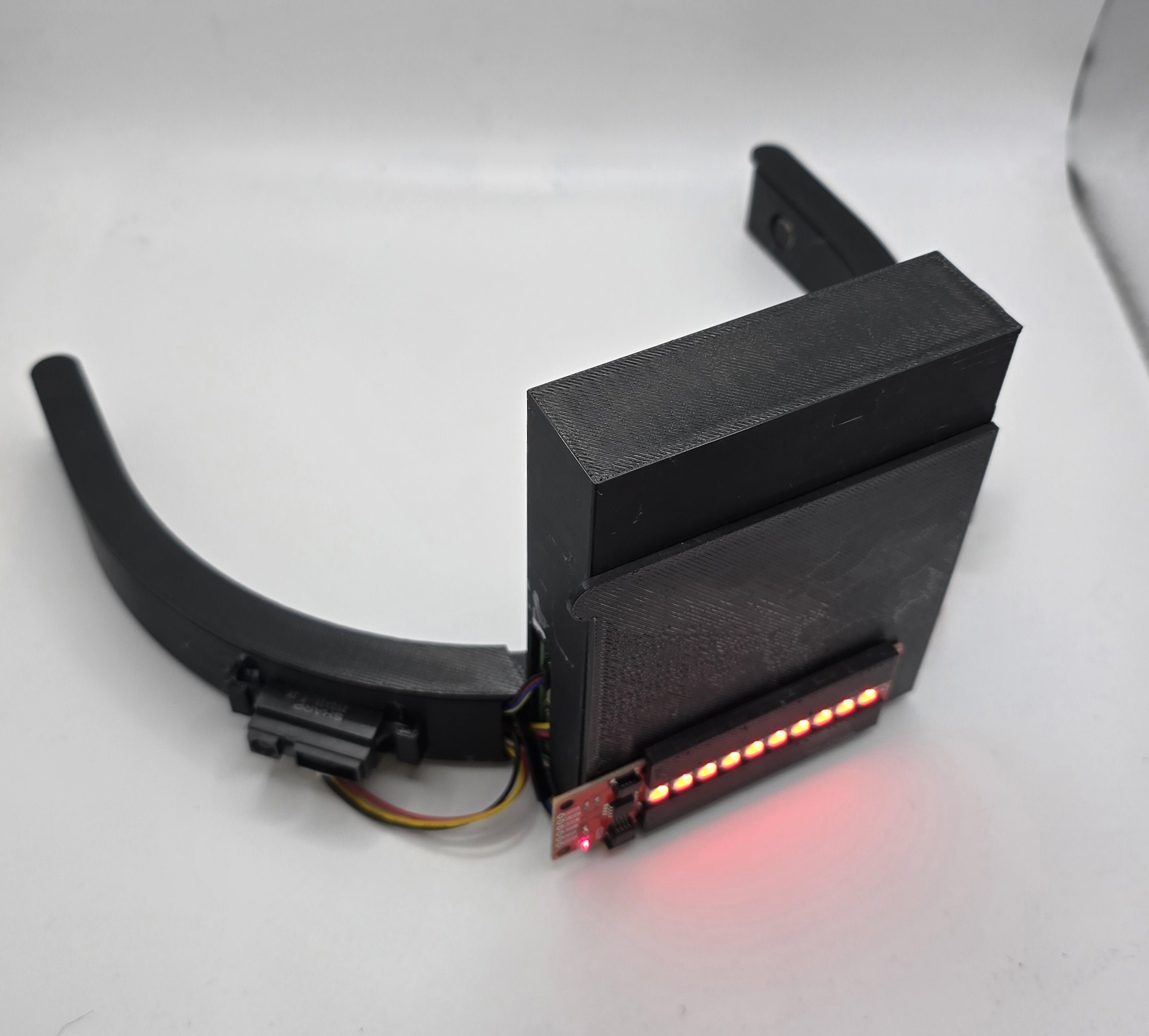
- HRS 01- We constructed a 3d Model that went around the helmet from the back; at either end of the semi-circular housing, we mounted a Haptic Motor. Individual haptic motor drivers with common I2C buses controlled these motors. The devices were selected using an enable line(Met).

- Blind Spot Monitoring System:
- HRS 02- Designed mounting for Sharp IR sensors, which were polled when a turn signal was active. The IR sensor used had an analog output, which was converted to a digital signal using Opam as a comparator, and the distance for detection was set using potentiometers(Met).

- Accelerometer System:
- HRS 03- An On-Board accelerometer was included, which polled all the axes. The z-axis data was used to detect the deceleration of the rider, while other axes were used to detect theft in lock mode and fun mode to change the LED strip light(Met).
https://github.com/ese5160/a14g-final-submission-t26-circuit-crusaders/assets/57740824/c87559a6-25c6-4372-be17-2f7c5e155280
Video Link: Link
- Bluetooth Module:
- HRS 04- We dropped installation of the Bluetooth module due to the limited time and effort required for developing mutex-protected UART communication and the requirement for a Mobile App(Not Met).
- Wifi Module:
- HRS 05- The wifi module, integrated in the SAMW25, was used to connect to the MQTT hosted on Azure VM and communicate with the Node-Red Dashboard(Met).
- Indication LED System:
- HRS 06- We decided to use a single LED strip and control the LEDs on the strip to indicate Left and right turns and brake(Met).

Software Requirements
- Directional Haptic Vibration Notification System:
- SRS 01 - The software shall control the vibration motor via a motor driver controlled over I2C protocol to vary intensity based on distance from a turn and navigational data(Met)
- SRS 02 - The software shall enable the appropriate vibration motor(left or right) based on directions received. It shall have different vibration patterns and intensity based on the type of turn and distance from a turn(Met)
- Blind Spot Monitoring System:
- SRS 03 - The software shall start recording obstacles from the Obstacle sensors when turn signals are active(Met).
- SRS 04 - The software shall also indicate to the user via vibration motors if obstacles are present(Met).
- Accelerometer System:
- SRS 05 - The accelerometer shall continuously read all axes every 500ms with a resolution of 16 bits(Met).
- SRS 06 - The accelerometer shall detect if the rider is stationary or in motion(Not Met).
- SRS 07 - The accelerometer shall be used to detect a crash and raise an alert(Not Met).
- SRS 08 - The accelerometer shall detect unusual motion when the helmet is in lock mode(Met).
- Bluetooth Module:
- SRS 09 - The software shall manage the Bluetooth module to establish an effective and reliable wireless connection between the helmet and a smartphone for data transmission for receiving navigational data only(Not Met).
- Wifi Module:
- SRS 10 - The software shall manage the Atmel® SmartConnect ATWINC1500 wifi module to enable wireless internet connectivity for IoT applications in the helmet(Met).
- Indication LED System:
- SRS 11 - The system shall turn left and right LED strips to blink orange during a respective turn signal(Met).
- SRS 12 - The system shall blink the brake LED strip when the rider is stationary and turn solid when in motion. stationary and motion states will be determined via the accelerometer(Met).
https://github.com/ese5160/a14g-final-submission-t26-circuit-crusaders/assets/57740824/da8a2328-48fe-4e5c-a39c-3381b75492b9
Video Link: Link
4. Project Photos & Screenshots
Final Project


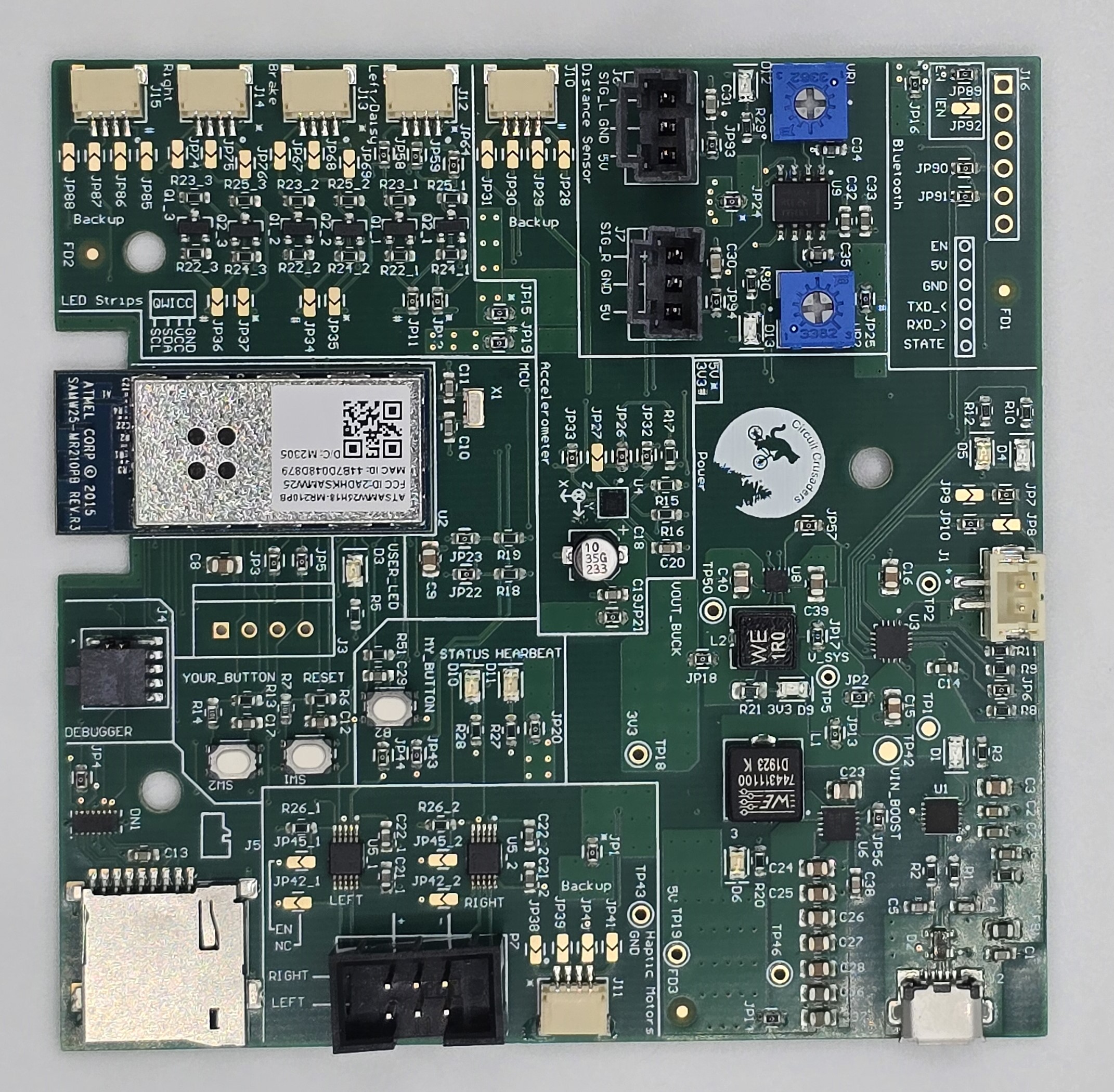
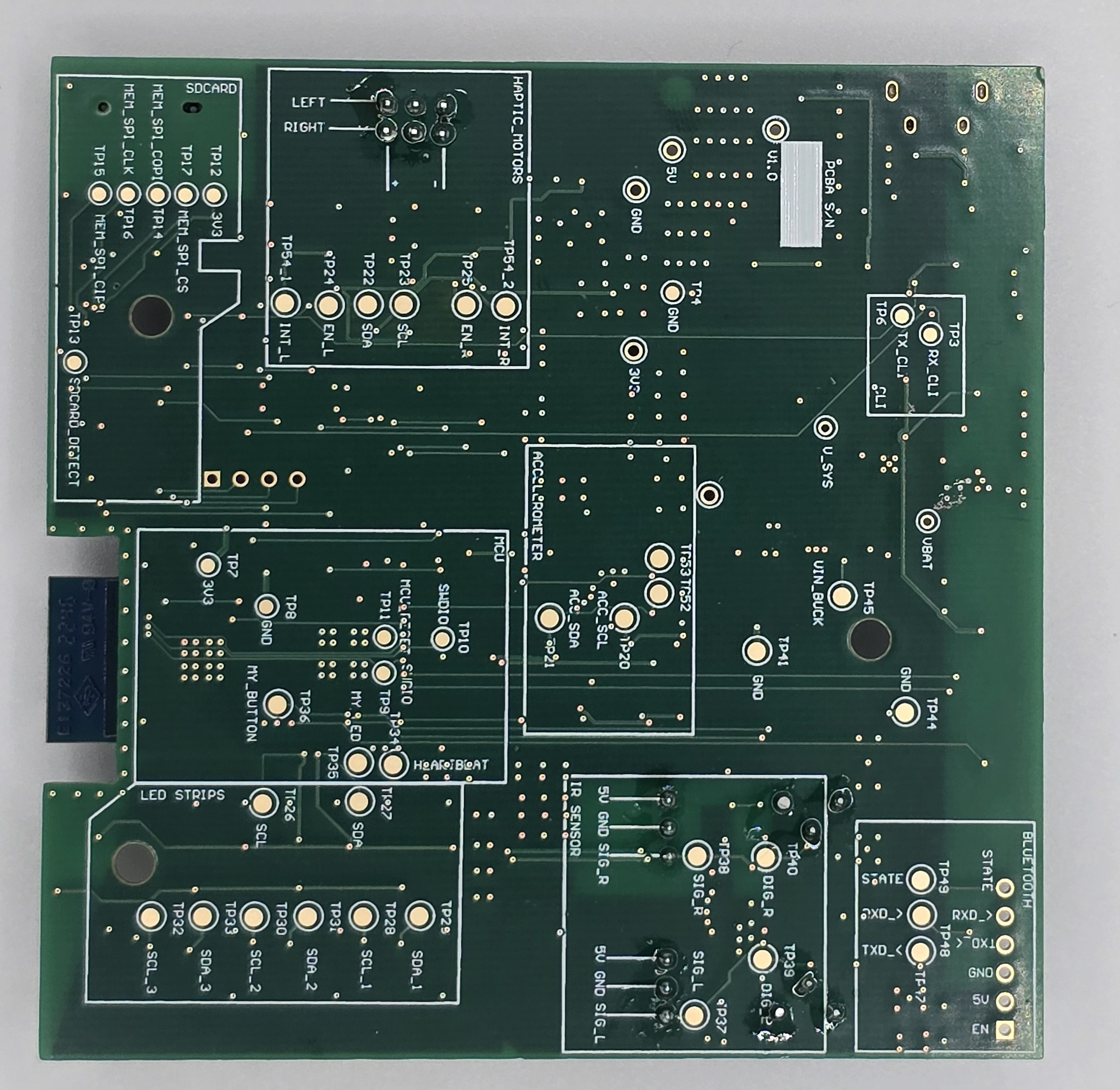
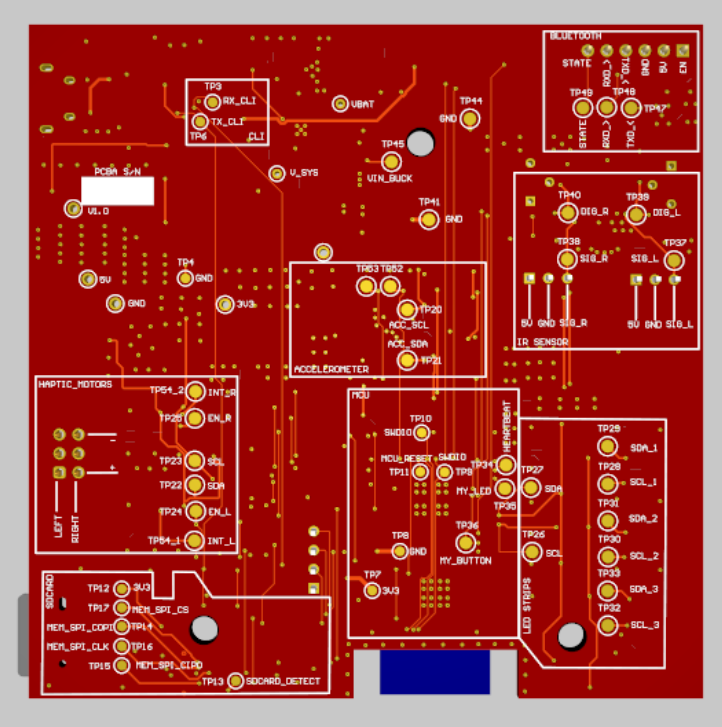
PCBA
Thermal Image


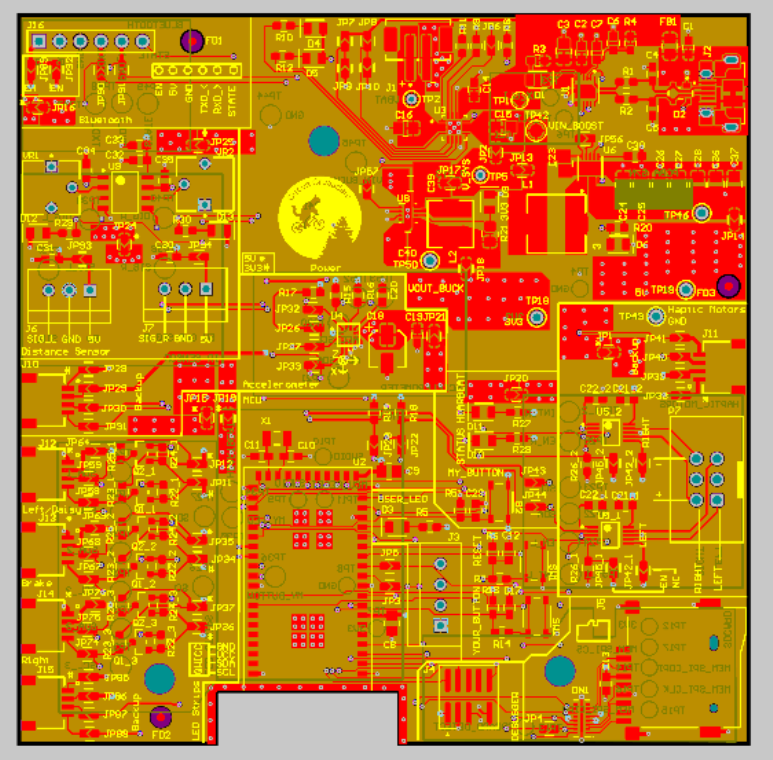
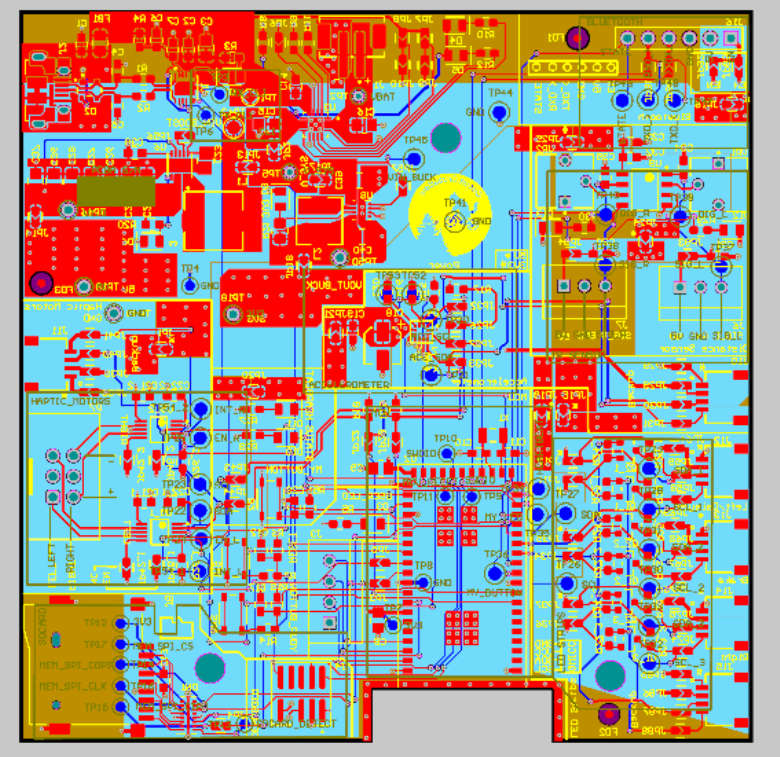
Altium 2D View
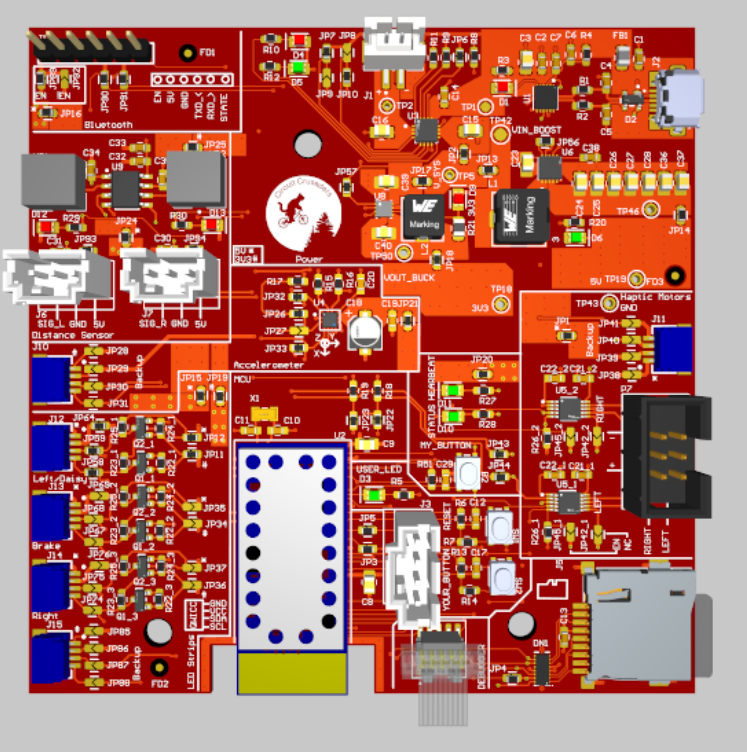
Altium 3D View
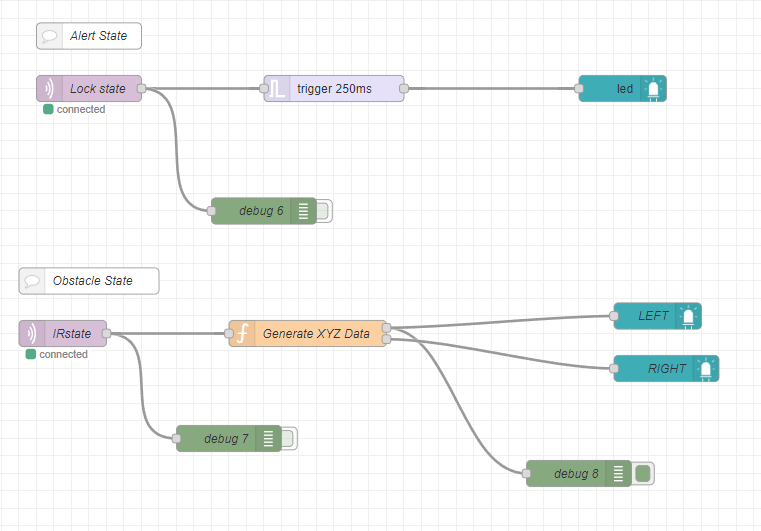
Node-Red Dashboard
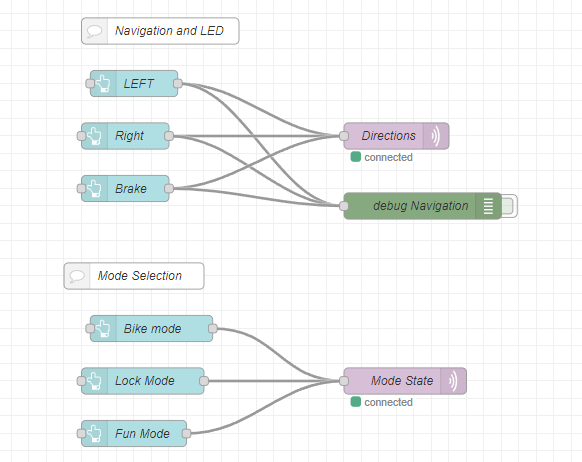
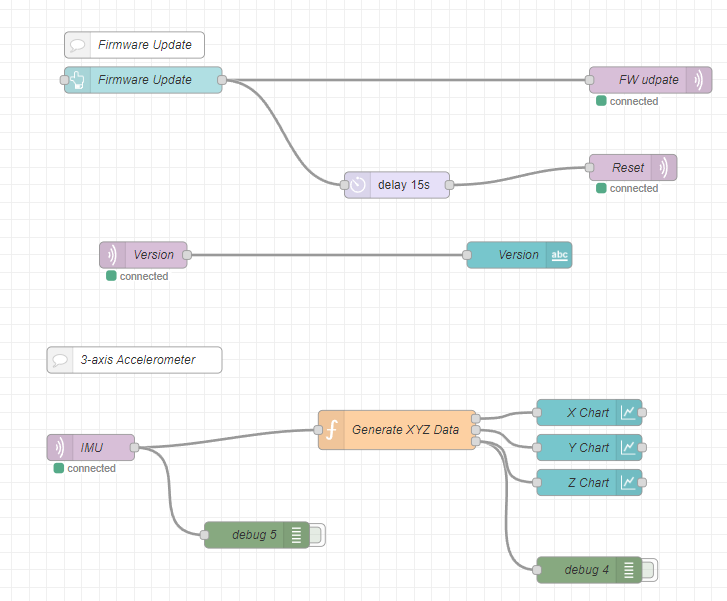
Node-Red Backend
Block Diagram
Inside Detkin Lab
https://github.com/ese5160/a14g-final-submission-t26-circuit-crusaders/assets/57740824/93ad38d4-b419-4345-8826-6e7573682023
Video Link: Link
3D Model
3D printed object courtesy of the University of Pennsylvania Libraries’ Holman Biotech Commons