a14g-final-submission-s25-t22-x-y-circuiteers

a14g-final-submission
* Team Number: T22
* Team Name: X&Y Circuiteers
* Team Members: Xiran Hu, Yuner Zhang
* Github Repository URL: https://github.com/ese5160/a14g-final-submission-s25-t22-x-y-circuiteers
* Description of test hardware: (development boards, sensors, actuators, laptop + OS, etc) : The laptop, SAM W25 Xplained Pro development board, SD card.
1. Video Presentation
Google Drive Link: Final_Video_Presentation.
2. Project Summary
Device Description
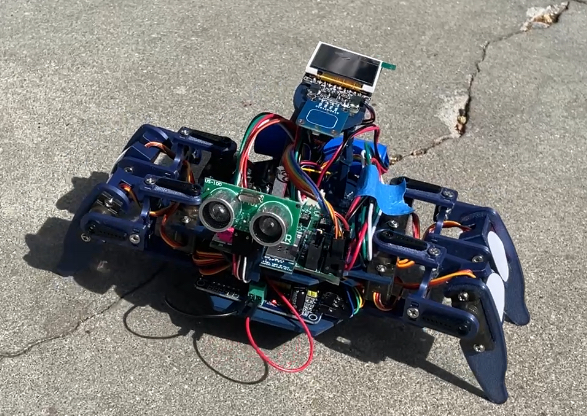
We designed a four-legged robot named Bobi, capable of walking, striking playful poses, and monitoring its surroundings to provide timely alerts. Inspired by the longing for a pet, Bobi serves as both a lovable companion and a smart home assistant.
Our motivation stemmed from a desire for companionship and emotional comfort in everyday life. Bobi addresses this by acting as a friendly presence while helping users stay aware of their home environment.
Bobi enables real-time monitoring of temperature, humidity, air quality, and obstacle distance through an internet-connected system. Users can control Bobi via a web-based interface, and we support OTAFU (Over-The-Air Firmware Updates) for remote maintenance.
Device Functionality
Bobi features two core functionalities: movement and environment monitoring.
-
Movement:
A servo driver board connected to the SAMW25 microcontroller controls eight servo motors to operate Bobi’s legs. Bobi can move forward, backward, turn left or right, say hi, lie, wiggle, fighting, push up, sleep, dance and warm up. Pressing the touch sensor triggers a playful wiggle, while the gesture sensor detects hand waves to turn Bobi left or right. -
Environment Monitoring:
Bobi monitors temperature, humidity, VOC levels (air quality), and obstacle distance. If any value exceeds the normal range, Bobi displays a warning on-screen and sounds a buzzer. For example, if an object is detected too close by the ultrasonic sensor, Bobi will beep and automatically move backward. -
NFC Integration:
Tapping a phone on Bobi’s leg triggers a custom message display on the screen.

Challenges
-
Servo Coordination:
Controlling eight servo motors simultaneously to enable smooth, lifelike movements was our first major challenge. We tested numerous angle-delay combinations to achieve natural motion. -
Memory Constraints:
Integration revealed memory limitations when running all functions concurrently. To address this, we implemented FreeRTOS for efficient task scheduling and added a toggle switch to enable gesture detection only when needed, saving system memory.
Prototype Learnings
Building Bobi taught us the importance of co-planning hardware and software from the start. Synchronizing movement control with sensor feedback was key to achieving responsive, realistic behavior.
We also discovered the value of incremental testing—debugging in small steps allowed us to identify and resolve issues early, ultimately improving the design.
If we were to redesign Bobi, we would:
- Choose a microcontroller with greater memory capacity.
- Strengthen the robot’s frame for better stability.
- Develop a mobile app for enhanced control and user experience.
Next Steps & Takeaways
For future iterations, we plan to:
- Add more gesture types for expanded interaction.
- Offload data processing to the cloud to reduce local memory usage.
- Add a camera for face, number, and expression recognition to enhance user interaction.
- Integrate a motion-sensing glove to trigger actions like sitting via specific gestures.
Through ESE5160, we gained practical skills in:
- PCB design
- Hardware debugging
- FreeRTOS task management
- Firmware updating
This course gave us end-to-end experience in building a complete IoT system, blending embedded systems with real-world applications.
Project Links
- Frontend Node_RED Link: http://52.224.120.179:1880/ui/#!/0?socketid=mmrCvhwkhdHmjPopAADz
- Backend Node_RED Link: http://52.224.120.179:1880/#flow/80e1a0e60252a46e
- PCBA on Altium 365: https://upenn-eselabs.365.altium.com/designs/A79E618E-7113-4BD9-AB95-6F9120FF25BC
3. Hardware & Software Requirements
This section reviews our original hardware and software requirements, outlines our testing process, and notes whether each was met.
Hardware Requirements Specification (HRS)
HRS 01 – Core Microcontroller
- Met.
- Used SAMW25 with Wi-Fi and support for I2C, SPI, UART, and PWM. All interfaces worked as needed.
HRS 02 – Ultrasonic Sensor
- Met.
- Accurately detected obstacles in the 10–25 cm range. Triggered backward movement when too close.
HRS 03 – Temperature and Humidity Sensor
- Met.
- Compared with external meter; readings within acceptable error (±2°C, ±5%).
HRS 04 – Air Quality Sensor
- Met.
- VOC values responded correctly. Alerts triggered above 400 ppb.
HRS 05 – Touch Sensor
- Met.
- Touch triggered servo movement reliably in all test cases.
HRS 06 – LCD Display
- Met.
- Displayed real-time temperature, humidity, VOC, distance, and movement state.
HRS 07 – Buzzer
- Met.
- Activated during environmental alerts; sound was clear and consistent.
HRS 08 – Servo Motors
- Met.
- Controlled all 8 servos with stable PWM updates; motion patterns tested successfully.
HRS 09 – Power System
- Partially Met.
- Used Li-Ion battery with buck/boost circuits. Power dips occurred under heavy servo load; improvement needed.
HRS 10 – Structure and Materials
- Met.
- Used 3D-printed parts. Frame was stable, total weight < 4 kg.
Software Requirements Specification (SRS)
SRS 01 – Servo Motor Control
- Met.
- PWM updated every 50 ms. Predefined motions ran smoothly.
SRS 02 – Obstacle Detection and Avoidance
- Met.
- Sampled every 1s. Avoidance triggered at <10 cm.
SRS 03 – Environmental Data & Alerts
- Met.
- Collected every 1s. Alerts worked at defined thresholds (e.g., VOC > 600 ppb).
SRS 04 – Touch Response
- Met.
- Touch caused consistent wiggle action.
SRS 05 – Communication & Remote Control
- Met.
- Synced data and responded to control commands via Wi-Fi every 1s.
4. Project Photos & Screenshots
Final Assembly
- Completed Robot
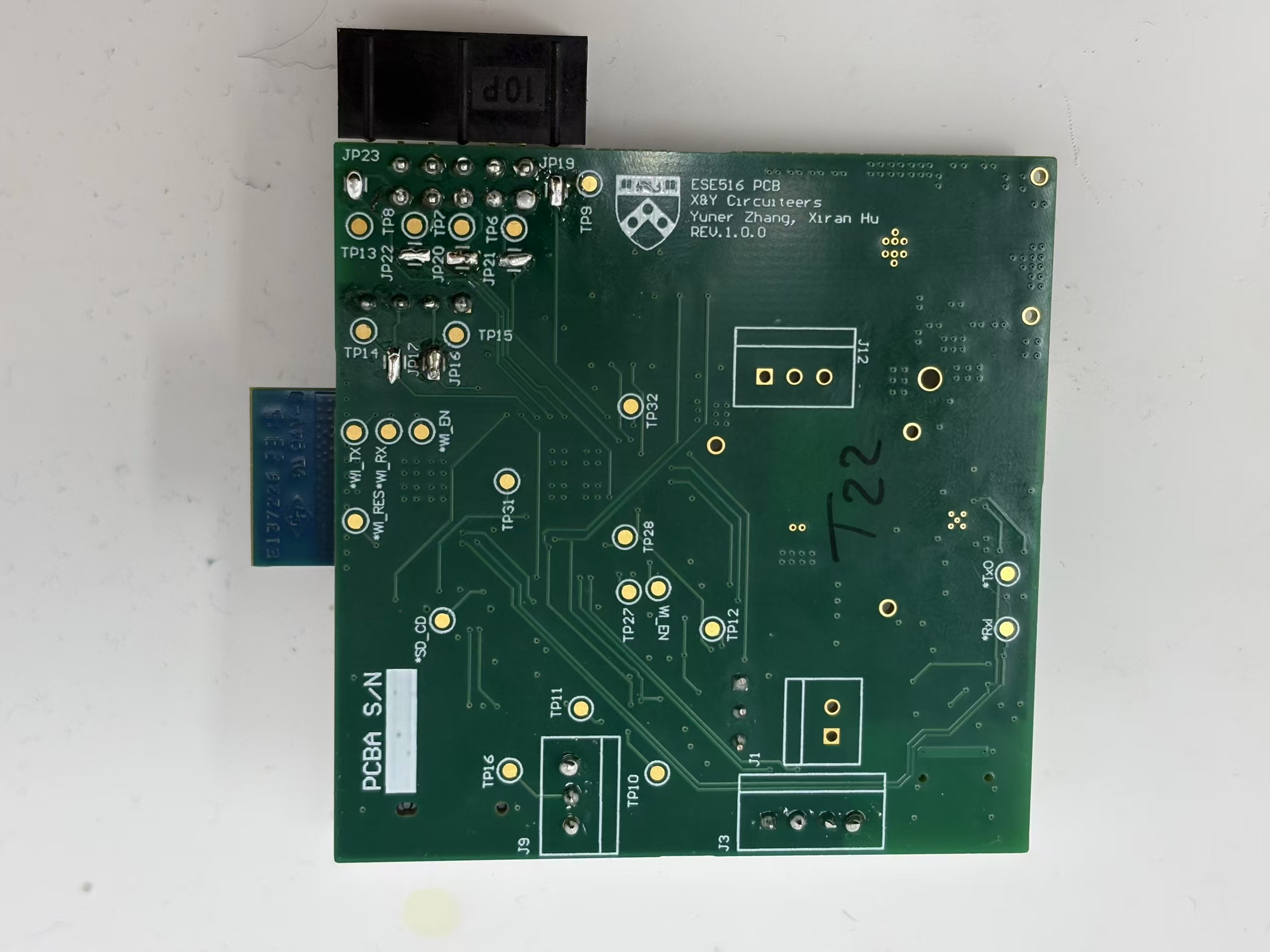
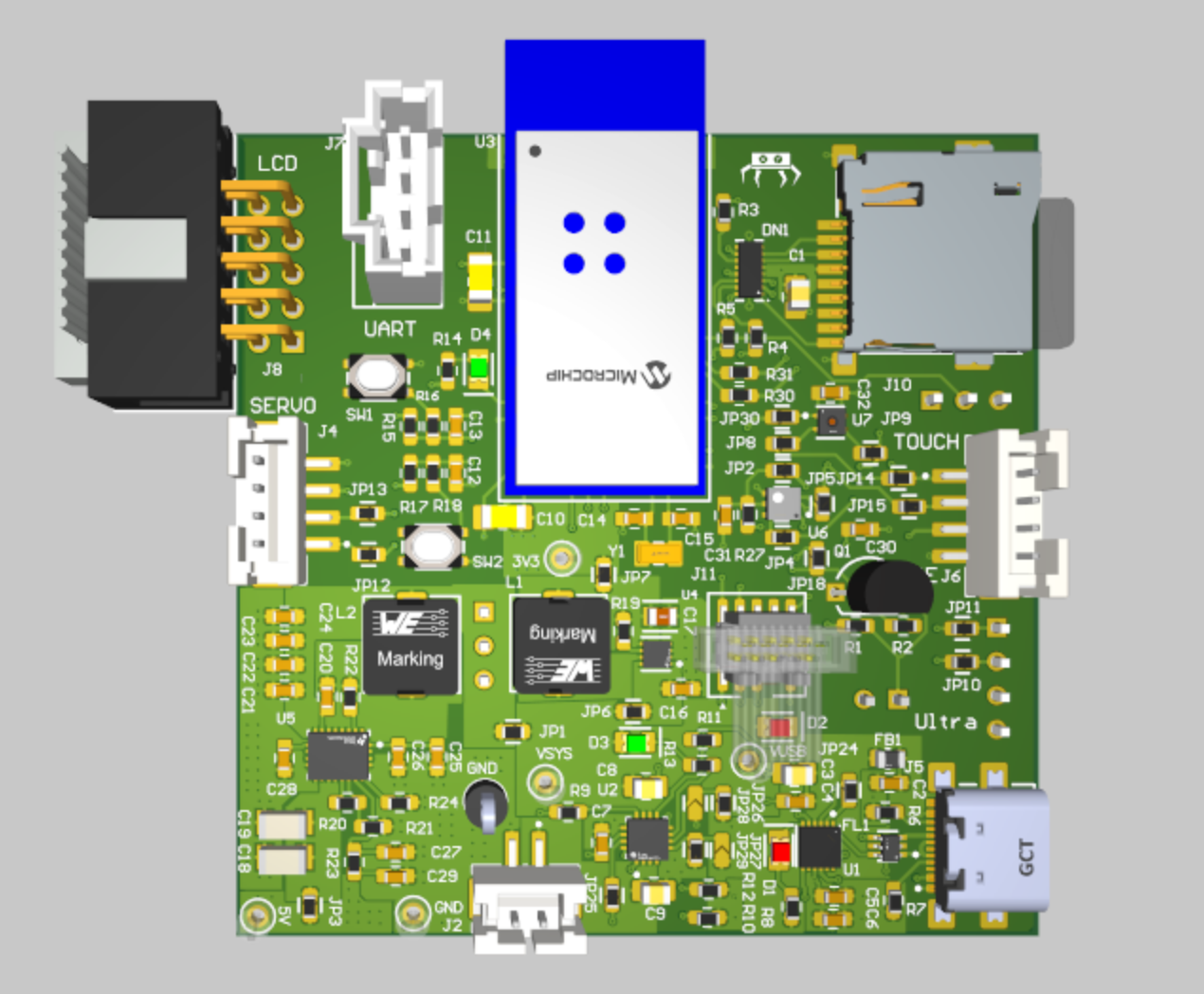
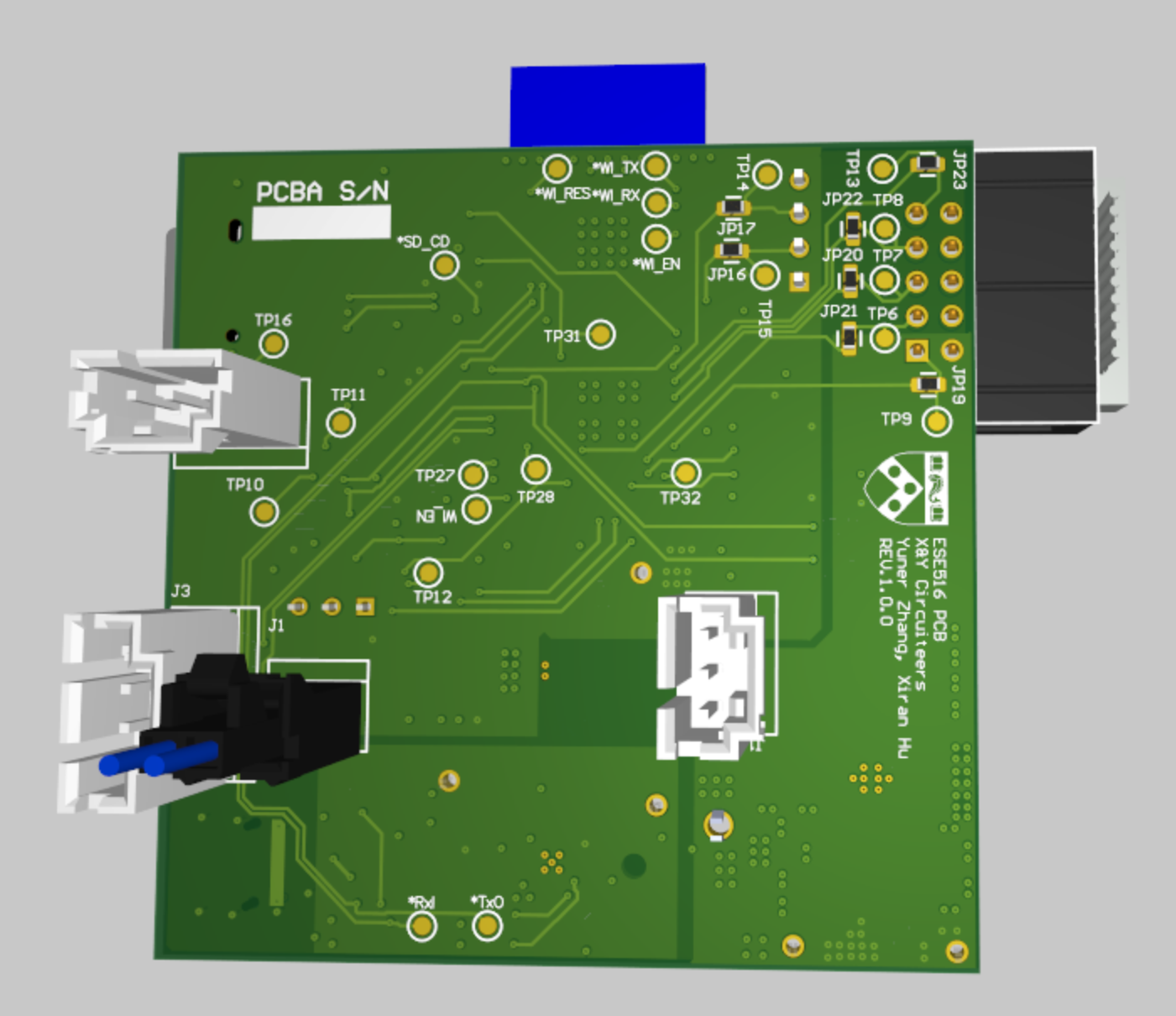
Hardware: PCBA
- Top View

- Bottom View
Thermal Imaging
- Thermal Camera Snapshot
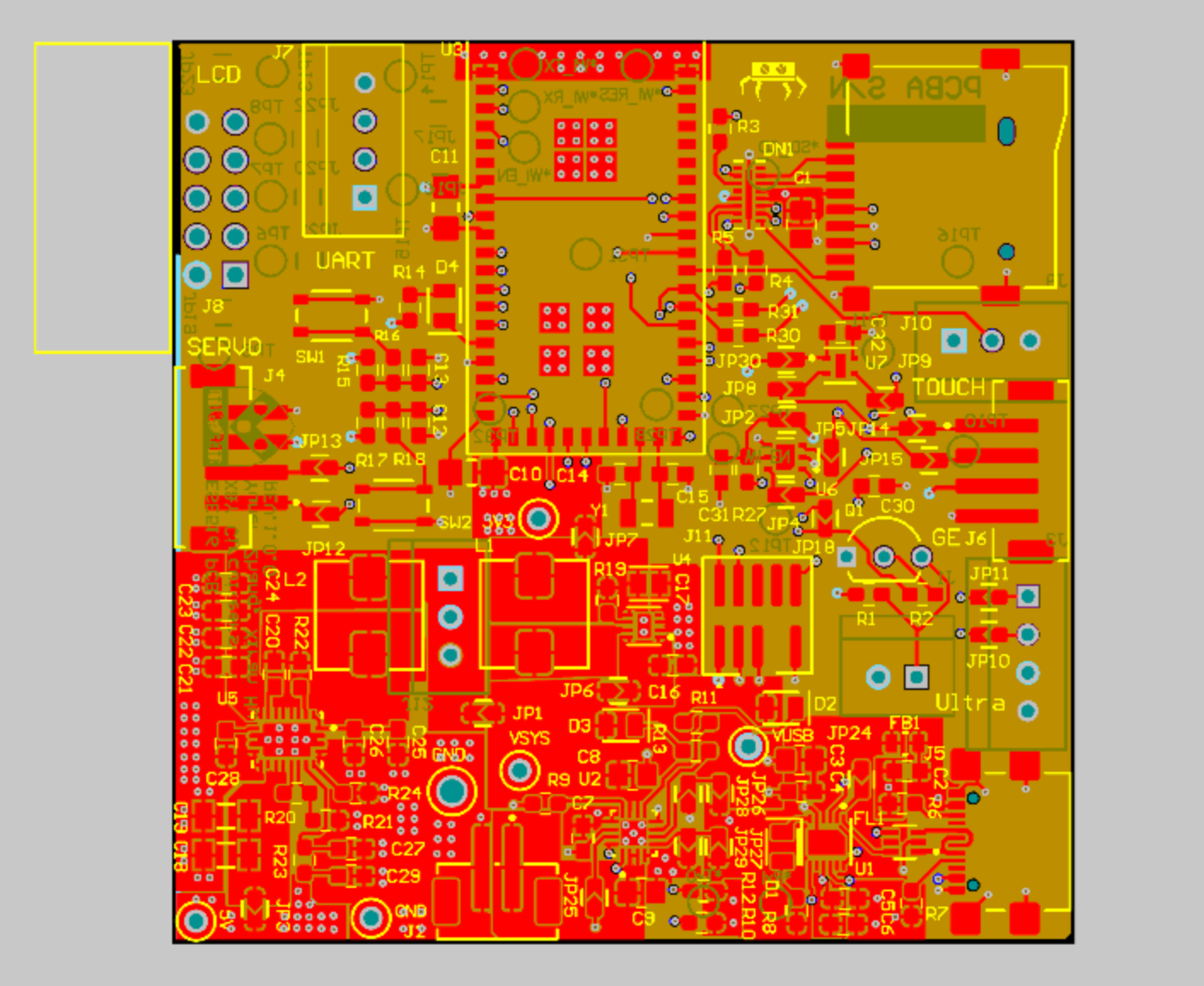
Altium Board Design
- 2D Layout
- 3D View - Perspective 1
- 3D View - Perspective 2
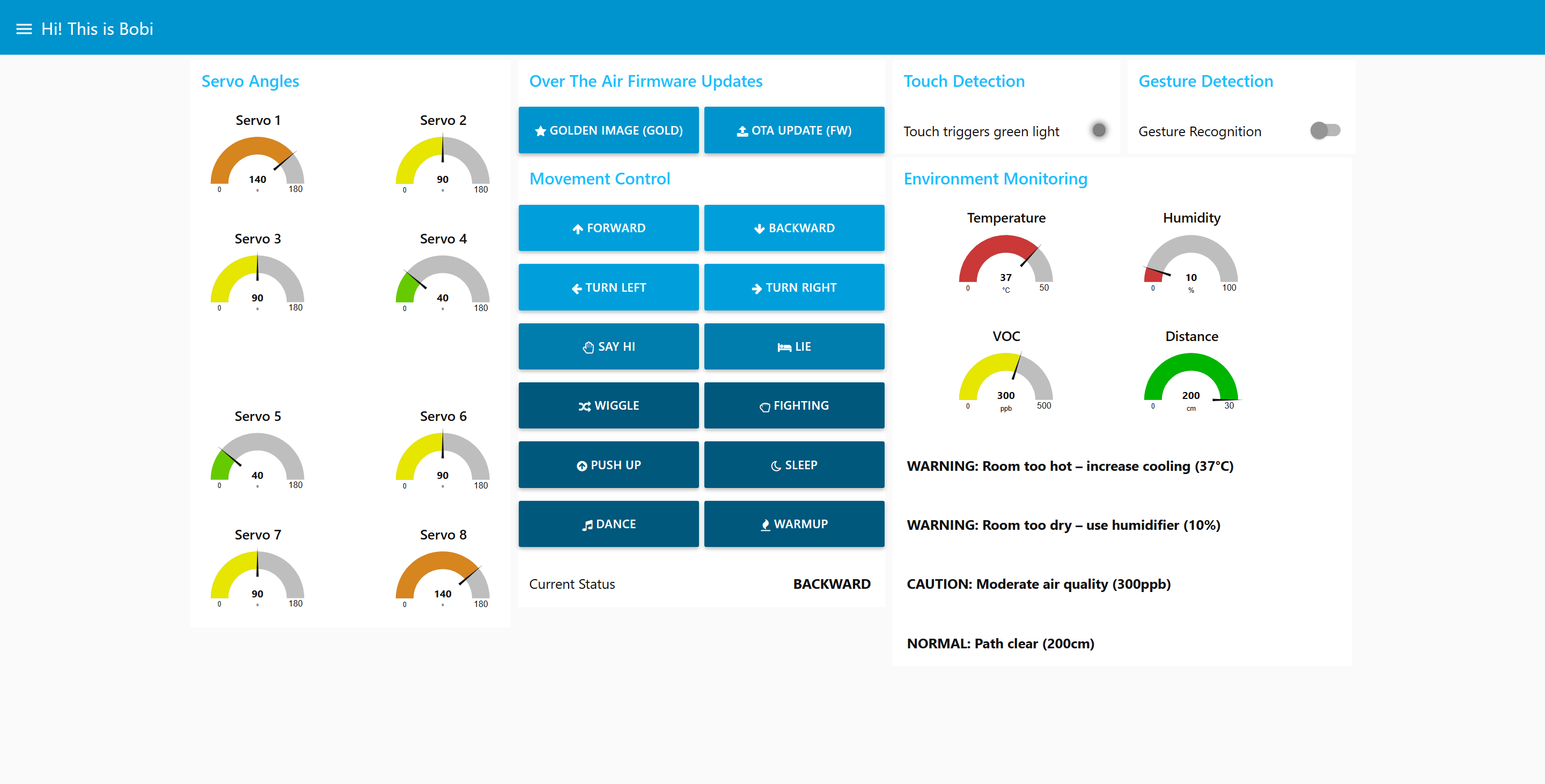
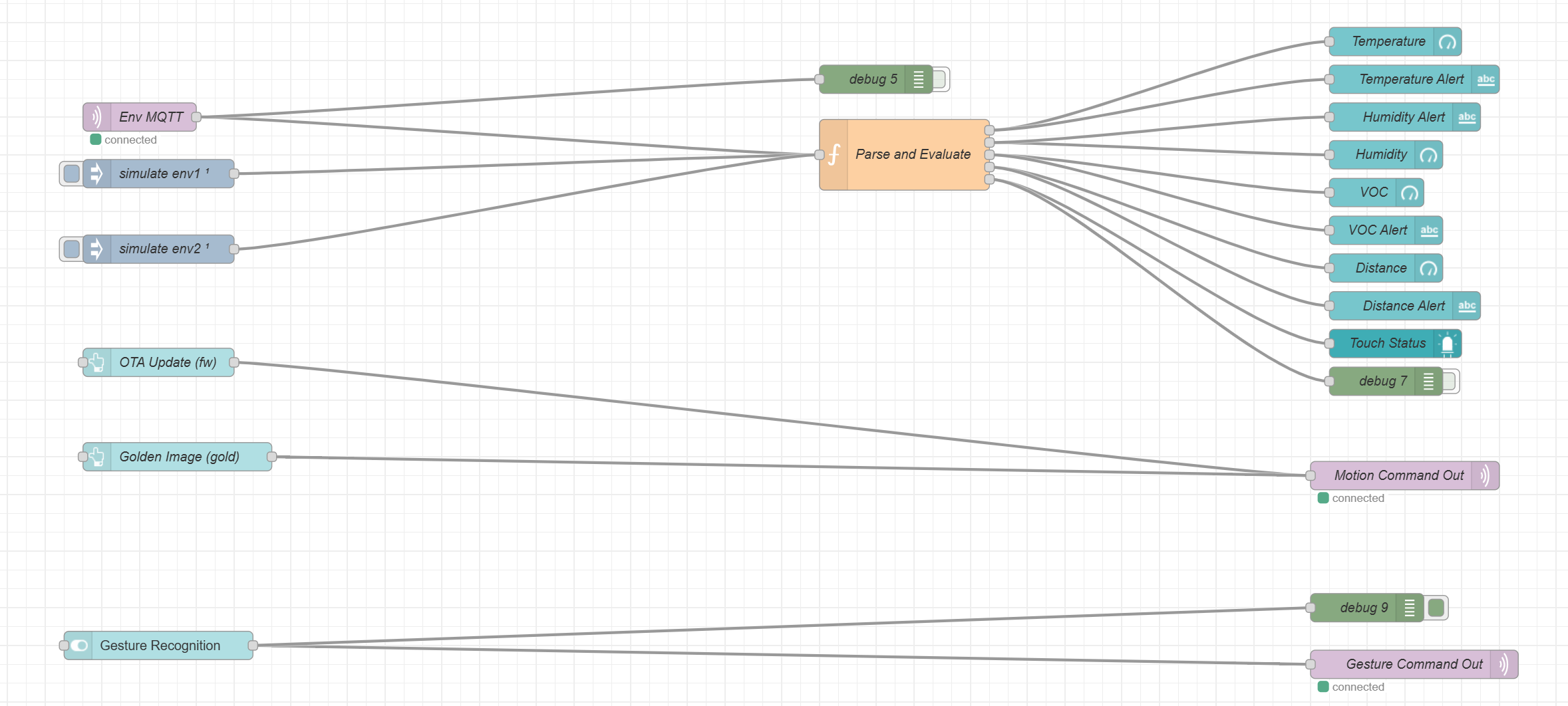
Software: Node-RED Interface
- Dashboard Interface
- Backend Flow - Part 1
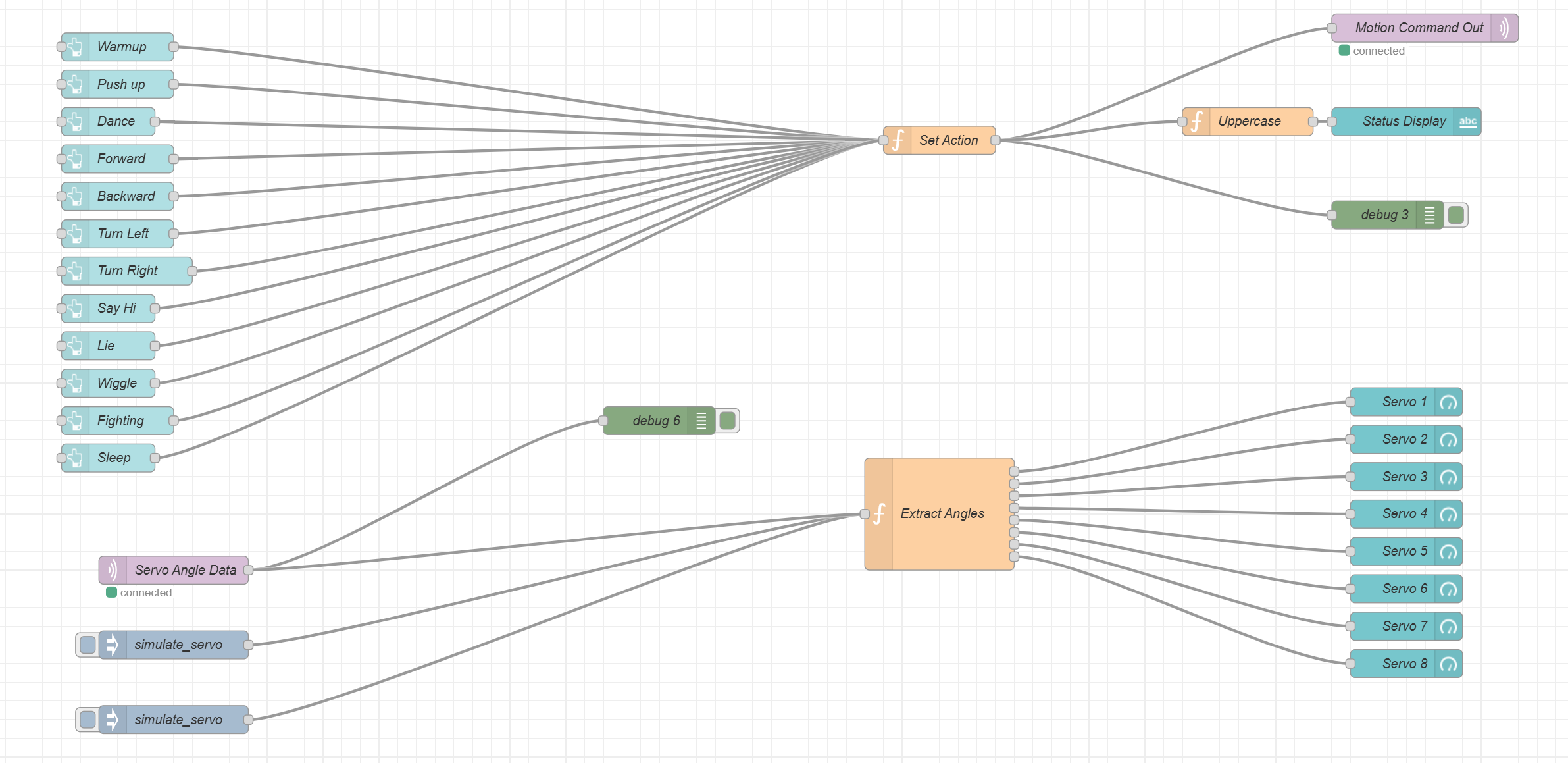
- Backend Flow - Part 2
System Overview
- Block Diagram
Codebase
-
Final Embedded C Firmware Codebase
firmware_code -
Node-RED Dashboard Code
final_node_red